Table of Contents
Preface
Omniscient is a relatively small project, but a project I learned A LOT from. Specifically, how IPC and Linux shmem() - shared memory works.
This started because I wanted to do something EXTRA for the programming portion of me and my group's omnichicken.
So I had a bright idea to create something ridiculously complex and unneeded - a self-contained observer for the robot where I can monitor what the robot is doing at a given moment.
Front-End Overview
Now, I already learned a thing or two while drafting up my initial pipin web server, so I could at least use that as a foundation for this specific project.
First of all, the entire program including the front-end should be self-contained - as in, you wouldn't need to reference a separate front-end, where ever the binary goes the entire program with it, web server and all.
I can do this relatively easy in Axum like so:
async fn serve_html() -> Html<&'static str> {
let html = include_str!("./assets/index.html");
Html(html)
}
Repeat that process for any other assets I want to embed: styles.css, and script.js.
From what I gather, this pretty much converts whatever is passed inside the include_str!() macro into a string literal during comp-time. The string is then rendered based on whatever header::CONTENT_TYPE we set to.
For the serve_html() function above, it's already a built-in from Axum so it can literally just infer that specific content type. For others however, I need to specify the content type as well as return with a IntoResponse trait.
async fn serve_js() -> impl IntoResponse {
let js = include_str!("./assets/script.js");
([(header::CONTENT_TYPE, "application/javascript")], js)
}
Also, I'm doing raw JavaScript this time around since I don't want to deal with the HTMX stuff I had to wad through in the pipin project. That means I'll be processing JSON instead, which in my opinion is much easier, especially with serde_json.
Setting up the WebSocket client for the front-end JavaScript side was pretty trivial. There's a crap ton of tutorials out there and I went with the relatively simple Mozilla Dev Docs. Client connection looked like so:
const protocol = window.location.protocol === "https:" ? "wss:" : "ws:";
const ws_url = `${protocol}//${window.location.host}/ws`;
socket = new WebSocket(ws_url);
socket.addEventListener("open", (_) => {
console.log("Connected to WebSocket server");
});
socket.addEventListener("message", (event) => {
const message = event.data;
process_msg(message);
});
socket.addEventListener("close", (_) => {
console.log("Disconnected from WebSocket server");
});
It was extremely straightforward in terms of the JavaScript receiving side, I'll go over the sending side (Rust back-end) later on. But I basically get a giant blob of JSON and just parse that message, it's as simple as:
const data = JSON.parse(msg);
document.getElementById("mem").textContent = data.shared_mem;
document.getElementById("bot-mode").textContent = data.bot_mode;
// repeat for the other important data ...
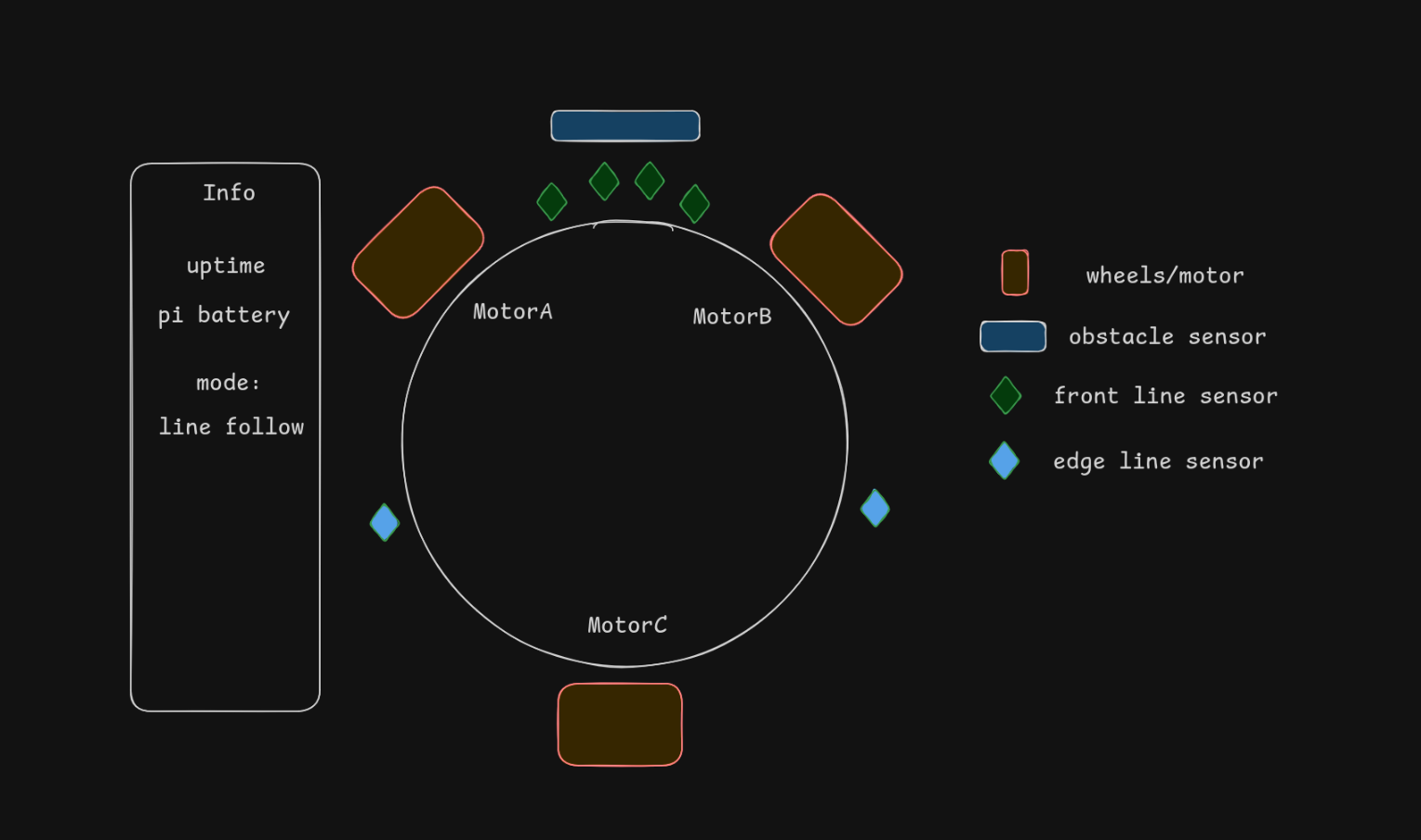
UI/UX
I initially drafted the UI in Excalidraw to get a good idea of how I wanted the layout to look. Something like this:
Creating a circle was pretty simple, there's hordes of tutorials online but it's pretty much just border-radius: 50%:
circle {
width: 400px;
height: 400px;
border: 3px solid var(--border);
border-radius: 50%;
position: relative;
background-color: darkgray;
}
Positioning all of it was a doozy though since changing the CSS would involve a recompile - since they are embedded into the program itself as strings at comp-time.
The final result looked something like this:
There was very little interactivity, in fact there's only one button in the entire UI - and that was for toggling the chicken sounds. This was intentional, because as you may remember, this web server is only meant to observe the robot, not actually control it.
IPC
Here's the meaty part, the shared memory and how the C code will interact with the Rust code. Or should I say not interact at all as the shared memory will be the data that the C will write to and the Rust will read from.
At first, I didn't really know what type of IPC I wanted to try for this project, the usual suspects were unix sockets, message queues, and shared memory. Ultimately, I went with shared memory because it seemed the fastest, and the most straight forward (at least in my head). Just reserve some spot of memory, mark it as specific to ours, write to it and then read from it whenever there are new updates. Seems easy enough right?
Here's what that shared memory struct looks like in both languages:
typedef struct {
int ver;
int direction;
int motor_power[3];
int bot_mode;
int obstacle;
int go_left;
int go_right;
int sensor_mode;
int sensors[4];
} Shared;
In Rust:
#[repr(C)]
#[derive(Debug, Clone, Copy)]
struct Shared {
ver: i32,
direction: i32,
motor_power: [i32; 3],
bot_mode: i32,
obstacle: i32,
obstacle_mode: i32,
go_left: i32,
go_right: i32,
sensor_mode: i32,
sensors: [i32; 5],
}
The key part is the #[repr(c)] which from the docs basically say: "It has a fairly simple intent: do what C does". And though I'm not using an FFI here, having the same order, size, and type padding for fields is probably a really good thing when accessing that same piece of memory that the C code writes to.
Another thing to note is the ver variable, which I'll expand on later but basically this is what's being used to tell the Rust program that a change happened, and to read the rest of the data.
Writing the Shared Memory in C
Here's what creating and writing to shared memory looks like, ripped straight from our Minecraft chicken bot:
Yeah, yeah I know, using geeks for geeks as a source is questionable, but it provided a pretty straight forward implementation that I adapted from.
I'd like to point out though, I already have experience with using mmap() from the GPIO C to Rust rewrite, so that's not a problem.
The main contention I have with this current implementation is that I'm going to be calling update_shared() multiple times within the core loop of the program, which runs every tick. What you don't see is that at first I was calling mmap() within update_shared().
This created a huge bottleneck within the program, and we noticed that overtime, our bot would start to slowly get bogged down as in - instructions were not being executed fast enough. Our sensors were on a separate thread that were updating volatile variables constantly, and the loop wasn't finishing fast enough to use those variables.
Fortunately, what you see from the snippet above is the current version, where I just store the shared_mem_ptr as a struct member (hopefully this isn't also bad), then just memcpy() the new data onto the shmem.
Here's an example of how it was being created and updated:
Shared shared = {
.ver = 0,
.direction = -1,
// ...
};
shared_fd = create_shared(&shared);
while (true) {
shared.direction++;
// updating it
update_shared(shared_fd, &shared);
}
Reading the Shared Memory in Rust
For the Rust part of this, I used the shared_memory crate which from what I can tell is just a wrapper around the nix crate - which has *nix API bindings.
I could've probably hand rolled my own by just using the nix crate since my implementation was gonna be pretty simple. But I was starting to get pressed for time, and while the crate hasn't been updated in a while, it seems to work.
Here's what the two functions for opening and reading the shmem looked like:
fn open_shared_mem() -> Result<Shmem, Box<dyn Error>> {
let mem = ShmemConf::new()
.os_id("omnigod")
.size(size_of::<Shared>())
.open()?;
Ok(mem)
}
fn read_shared_mem(mem: &Shmem) -> Shared {
let ptr = mem.as_ptr() as *const Shared;
unsafe { ptr.read() }
}
It's pretty straight forward right?
The only real part that probably needs some explaining is: let ptr = mem.as_ptr() as *const Shared. And this is because mem.as_ptr() returns a raw reference to a mut u8 pointer, and for us to actually be able to read from it, it first needs to be casted to a Shared struct. And since we only need to read from it, it can stay as a const.
I still had to use unsafe Rust for reading but that's OK for this use case.
Integrating WebSockets
Another key point in having this program observe, is to make it near real-time. I'm already using shmem for speed, so how can we make our updates to the UI fast as well. And that's where Axum web sockets come in. Truthfully, the documentation and the example were good enough for me. As they provided pretty much an extensive explanation on how to send and receive web socket messages - so kudos to the axum team.
But there was some complications, specifically because of the shared_memory crate. The Rust side needed to continuously poll the shared memory and send updates to connected clients. Since the crate doesn't implement the Send trait, I had to use spawn_blocking to run the memory reading in a separate thread:
let read_task = task::spawn_blocking(move || {
let mut mem_available = false;
let mut mem = None;
let mut last_ver = -1;
loop {
if !mem_available {
match open_shared_mem() {
Ok(opened_mem) => {
println!("opened shared mem");
mem = Some(opened_mem);
mem_available = true;
}
Err(e) => {
println!("waiting for shared memory: {e}");
sleep(Duration::from_secs(5));
continue;
}
}
}
if let Ok(shared) = read_shared_mem(shared_mem) {
if shared.ver != last_ver {
last_ver = shared.ver;
// convert to JSON and send via channel
let msg = SocketMsg {
// ...
// read from shared data here
};
let json = serde_json::to_string(&msg).unwrap_or_default();
tx.blocking_send(json);
}
}
sleep(Duration::from_millis(100));
}
});
And if you remember from before, the version field ver acts as a simple change detection mechanism - where the C code increments it on every update, and Rust only sends WebSocket messages when it detects a new version.
ALSA and Cross-Compiling
One of the more frustrating parts was getting audio to work using the rodio crate on the Raspberry Pi. The project plays random chicken sounds because why the hell not? But this required cross-compiling ALSA libraries.
This was a huge pain in the ass, because I'm relatively new to developing in Rust, but also creating developer environments in NixOS as well. So trying to create a cross compile config for this project was genuinely annoying to say the least. I even thought about just giving up and going back to arch, eventually I stuck through it and tried a funky work-around.
I used Nix flakes to manage the cross-compilation environment. The key was setting up the correct environment variables for the aarch64 target:
aarch64-cc = "${aarch64-pkgs.stdenv.cc}/bin/aarch64-unknown-linux-gnu-cc";
AARCH64_CC = aarch64-cc;
AARCH64_PKG_CONFIG_PATH = "/usr/lib/aarch64-linux-gnu/pkgconfig";
AARCH64_RUSTFLAGS = "-C link-args=-Wl,--dynamic-linker=/lib/ld-linux-aarch64.so.1";
Now, what you don't see is me struggling to get this working. I tried using podman and docker to build the project - which was my first time ever writing dockerfiles. That still didn't work.This took me a while to figure out and time was dwindling down as I was also the main programmer for the chicken - which needed precedence over this simple observer program.
Ultimately, I found out that I was meant to be using gnu instead of musl because musl apparently didn't have the static libraries needed for ALSA and libaudio to work. Here's a snippet from the abomination that's in my Makefile:
release:
PKG_CONFIG_ALLOW_CROSS=1 \
PKG_CONFIG_PATH=$(AARCH64_PKG_CONFIG_PATH) \
PKG_CONFIG_LIBDIR=$(AARCH64_PKG_CONFIG_LIBDIR) \
CARGO_TARGET_AARCH64_UNKNOWN_LINUX_GNU_LINKER=$(AARCH64_CC) \
RUSTFLAGS="$(AARCH64_RUSTFLAGS)" \
cargo build --release --target $(TARGET_ARCH)
qemu-release: release
qemu-aarch64 -L /usr/aarch64-linux-gnu $(ROOTNAME
Eventually I got it to finally work - quite frankly I probably introduced problems I don't see yet but time is time, and I needed something.
Final Thoughts
I got skill-issued so hard trying to figure out cross compilation on nix, that for a moment I was genuinely thinking of nuking my Nix dotfiles and just re-installing Arch. Luckily, my addiction of Nix won the battle and I just stuck to it.
I learned a decent amount when it came to shared memory. If I were to do it all over again, I would've probably hand-rolled my own shmem wrapper for the nix crate. I could've also ripped existing cross compilation flakes from GitHub, seeing as I need to use their search feature more often. Anyways, thanks for the read. Hopefully I made you cringe all the way through seeing all this crappy code - bye now.